Разработка алгоритмов поиска оптимального маршрута для БЛА при наблюдении им подвижных наземных объектов
В настоящее время в мире значительно возрастает роль беспилотной авиации. Среди задач, решаемых с помощью беспилотных летательных аппаратов, особое место занимают задачи наблюдения наземных объектов. При решении данной задачи крайне важна оперативность получения данных об объекте наблюдения. Существует ряд алгоритмов построения оптимального маршрута облета объектов, однако большинство из них рассчитано только на неподвижные объекты, что значительно ограничивает их применимость для решения целого ряда актуальных задач. В случае использования существующих алгоритмов, рассматривающих неподвижные объекты, полученный оптимальный маршрут может оказаться далек от оптимального при движении хотя бы одного из наблюдаемых объектов. В связи с этим, возникает необходимость разработки алгоритмов, которые учитывают подвижность наблюдаемых объектов при решении задачи поиска оптимального маршрута их облета, что позволит оптимально расходовать имеющиеся ресурсы (время, топливо) и тем самым повысить оперативность наблюдения.
Во многих случаях для решения задачи наблюдения за наземными объектами целесообразно использование группы БЛА для обеспечения оперативности получения информации о множестве движущихся объектов, что ведет к необходимости разработки алгоритмов координации действий группы БЛА.
Важным является тот факт, что разрабатываемые алгоритмы должны быть способны рассчитывать оптимальные маршруты в течение очень короткого промежутка времени, так как будут выполняться в реальном времени в составе программного обеспечения БЦВМ.
Данная работа посвящена разработке алгоритмов поиска оптимального маршрута для БЛА при наблюдении им подвижных наземных объектов, а также алгоритмов оптимального распределения объектов между БЛА. При разработке алгоритмов учитывается динамика БЛА в условиях воздействия бокового ветра.
Исходными данными поставленной задачи являются:
характеристики БЛА;
параметры движения БЛА (скорость движения, начальный угол курса;
количество БЛА;
начальное положение и характеристики движения наземных объектов;
скорость бокового ветра;
начальный и конечный пункты движения каждого БЛА.
Постановка задачи
Для заданных параметров объектов, БЛА и метеорологической обстановки необходимо определить оптимальную стратегию распределения объектов между БЛА и проложить оптимальный маршрут для каждого из БЛА. Критерием оптимальности следует считать минимум времени полета группы БЛА (временем полета грумы БЛА назовем время, через которое последний БЛА достигнет конечного пункта своего маршрута при условии, что все БЛА начали движение из начального пункта маршрута в один и тот же момент).
При расчете оптимального маршрута необходимо учесть возможность воздействия бокового ветра, из-за которого БЛА может отклоняться от выбранного курса, что в свою очередь меняет длину траектории и оптимальность маршрута.
Анализируя исходные данные, можно сказать, что среди характеристик БЛА для реализации алгоритмов понадобятся следующие:
диапазон изменения скорости и высоты полета БЛА;
зависимость минимального радиуса разворота от скорости полета и скорости ветра.
Также оговаривается тот факт, что на борту БЛА присутствует аппаратура фото- или видеонаблюдения наземных объектов. Исходя из того, что современные объективы фотокамер позволяют провести фотосъемку в хорошем качестве с высоты до нескольких сот метров, выберем углы обзора камеры, учитывая, что камера должна полностью охватывать зоны недосягаемости БЛА (рисунок 1). Зоны недосягаемости – это те зоны, в которые БЛА не может попасть из своего текущего положения в силу того, что его разворот производится по окружности, радиус которой определяется его характеристиками.
аппарат программа беспилотный летающий
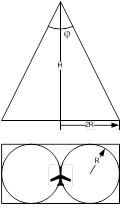
Рисунок 1. Выбор углов обзора камеры
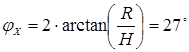
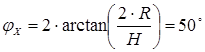
Примем высоту полета БЛА равной 200 метров. Радиус разворота БЛА в отсутствие ветра равен 60 метрам. Исходя из этого, рассчитаем углы обзора камеры по продольной и поперечной осям самолета:
При появлении бокового ветра необходимо скорректировать высоту таким образом, чтобы для нового минимального радиуса разворота выполнялись те же условия.
- Аналитический обзор существующих методов и подходов к планированию групповых действий
- Разработка модели одиночных действий БЛА
- Разработка нейронной сети – аналога модуля «Поиск оптимального маршрута для одного БЛА»
- Разработка модели групповых действий БЛА
- Моделирование работы модуля «Поиск оптимального маршрута нескольких БЛА»
- Оценка целесообразности разработки алгоритмов и программных продуктов
- Планирование разработки
- Определение затрат, себестоимости и цены
- Определение и оценка показателей экономической эффективности
- Охрана труда и окружающей среды
- Нормативные документы
- Понятие технологии программирования
Похожие статьи:
Система топливоподачи
Система топливоподачи дизеля в соответствии с рисунком 5 обеспечивает дозирование и подачу топлива в цилиндры дизеля в соответствии с порядком их работы и заданным режимом нагрузки. Из расходного бака 1 топливо поступает к топливоподкачивающему насосу 7 и через фильтр тонкой очистки топлива 6 подае ...
Оперативное планирование работы пассажирской станции
Цель оперативного планирования — обеспечить в конкретных условиях за сутки и смену выполнение заданных размеров движения поездов, регулировочных заданий, плана погрузки и выгрузки, графика движения поездов и плана формирования, а также основных показателей работы станции. Суточный план поступает из ...
Определение ориентировочной стоимости ремонтного предприятия
Для определения стоимости ремонтного предприятия суммируются стоимость зданий, оборудования с его монтажом, дорогостоящих приспособлений и инструментов, производственного инвентаря. При ориентировочных расчетах стоимость зданий и сооружений определяется по укрупненной стоимости 1м3 объёма здания. О ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация