Разработка модели групповых действий БЛА
Теперь необходимо решить задачу распределения объектов между несколькими БЛА. Для простоты рассмотрим случай распределения объектов между двумя БЛА. Для этого назначим каждому БЛА область ответственности, как показано на рисунке 1.4.1.
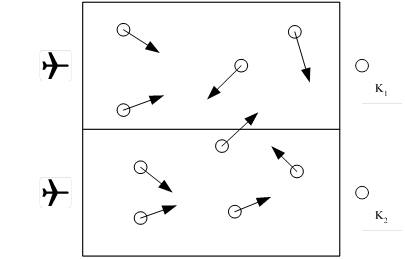
Рисунок 1.4.1 Разбиение области задач на части. К1, К2 – конечные пункты маршрута первого и второго БЛА соответственно
После этого проанализируем, какие из объектов пересекут линию раздела областей за заданный промежуток времени tК и разделим все объекты на три группы:
объекты, принадлежащие области ответственности первого БЛА;
объекты, принадлежащие области ответственности второго БЛА;
Спорные объекты, которые за время tК пересекли линию раздела областей ответственности, отведенных каждому БЛА.
Далее примем, что начальные и конечные пункты маршрута каждого БЛА расположены в соответствии с рисунком 8 (точные значения расстояний и углов могут меняться в соответствии с текущей навигационной обстановкой, но они должны быть точно известны на момент начала работы алгоритма).
Таким образом, объекты, принадлежащие области каждого БЛА, будут закреплены за этим БЛА, а спорные объекты будут распределены между ними таким образом, чтобы минимизировать время облета всех объектов группой БЛА.
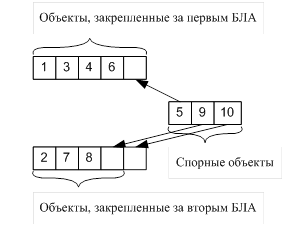
Рисунок 1.4.2 Пример распределения спорных объектов
Для оптимального распределения объектов между БЛА, объекты, принадлежащие каждому БЛА, занесем в соответствующий список, а из спорных объектов составим все возможные комбинации распределения между БЛА.
Далее, будем присоединять списки с вариантами распределения спорных объектов к существующим спискам для каждого БЛА и применять к ним алгоритм поиска оптимального пути, описанный в пункте 1.2. После анализа всех составленных комбинаций, выбираем из них ту, которой соответствует наилучшее значение критерия оптимальности. Полученная комбинация и есть искомый вариант распределения объектов между БЛА.
На рисунке 1.4.3 изображена общая схема работы алгоритмов поиска оптимального маршрута.
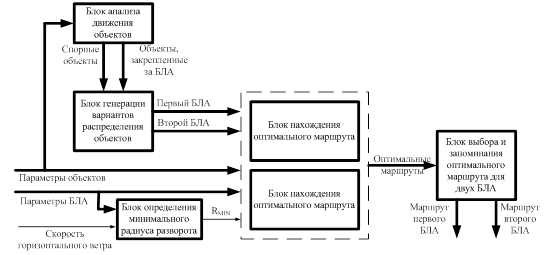
Рисунок 1.4.3 Общая схема работы системы
Разработка программы, моделирование системы и анализ результатов
На основании алгоритмов, разработанных в пунктах 1.2 – 1.3, была реализована программа, предназначенная для поиска оптимального распределения объектов между двумя БЛА. Данная программа была реализована и выполнена на языке MATLAB в среде разработки MatLab 2008a.
Для реализации алгоритмов была выбрана среда матlab по следующим причинам:
Данная среда обладает мощным пакетом встроенных функций, который позволяет быстро производить большинство математических операций любой сложности. Таким образом, нет необходимости затрачивать значительное время на реализацию этих функций;
Возможность использования вычислительных сетей, что также позволяет существенно сократить время исследований.
Среди недостатков использования данной среды можно выделить лишь один – высокая стоимость коммерческой лицензии. [6]
Листинги исходных кодов приведены в приложении 1.
Моделирование работы модуля «Поиск оптимального маршрута одного БЛА»
Промоделируем работу данного модуля для случая поиска оптимального маршрута облета пяти объектов и проанализируем результаты. Исходные данные и результаты проиллюстрированы на рисунке 1.5.1 и в таблице 1.5.1. Следует также отметить, что координаты по осям X и Y отсчитываются от некоторой начальной точки с координатами (0,0).
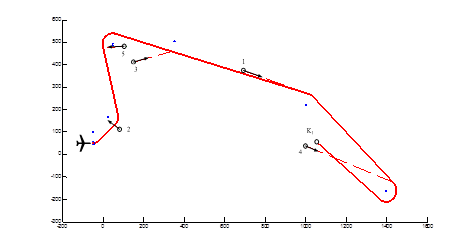
Рисунок 1.5.1 Результат выполнения модуля «Поиск оптимального маршрута для одного БЛА»
Таблица 1.5.1. Исходные данные для эксперимента
|
X, м |
Y, м |
V, м/с |
Курс, град. | |
|
БЛА |
-50 |
50 |
40 |
90 |
|
Первый объект |
689 |
374 |
15 |
72 |
|
Второй объект |
83 |
114 |
15 |
238 |
|
Третий объект |
152 |
412 |
15 |
103 |
|
Четвертый объект |
996 |
39 |
15 |
69 |
|
Пятый объект |
106 |
480 |
15 |
271 |
|
Конечная точка движения |
1050 |
50 |
- |
- |
Похожие статьи:
Объемы работ по
строительству земляного полотна
Объемы работ по строительству земляного полотна на главном пути определяются на основании исходных данных (рисунок 3). Дополнительный объем на раздельных пунктах вычисляется по следующей формуле: , (1) где - средняя рабочая отметка на станционных путях насыпей или выемок, м; n – количество путей на ...
Определение массы и длины пассажирского поезда
Масса пассажирского поезда определяется по формуле: , (2.1) Где – мощность локомотива, л. с.; – масса локомотива в рабочем состоянии, т; – среднеходовая скорость движения пассажирского поезда, км/ч; и – основное удельное сопротивление движению соответственно локомотива и вагонов при заданной средне ...
Технико-экономическое обоснование
Аварийность на дорогах и улицах Российской Федерации остаётся высокой и может быть отнесена к наиболее серьёзным социально- экономическим проблемам. Содержание проблемы безопасности дорожного движения и важность ее решения складываются из ряда компонентов материального и психологического плана. Гла ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация