Разработка модели одиночных действий БЛА
Решается задача поиска оптимального маршрута облета движущихся объектов одним БЛА с учетом ветра. Разобьем её на несколько подзадач.
Поиск оптимального маршрута облета неподвижных объектов одним БЛА без учета ветра;
Учет подвижности объекта;
Учет ветра;
Для решения задачи 1 запишем алгоритм перелета БЛА в точку с определенными координатами. Исходными данными для него являются:
Начальные координаты БЛА;
Начальный угол курса БЛА;
Координаты объекта;
Минимальный радиус разворота БЛА;
Координаты точки.
Проиллюстрируем это на рисунке 1.2.1.
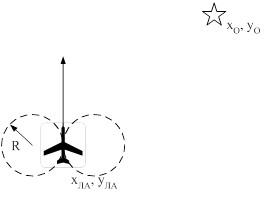
Рисунок 1.2.1 Начальные данные для задачи, где xЛА, yЛА – начальные координаты БЛА, xО, yО – начальные координаты объекта, R – минимальный радиус разворота БЛА, стрелкой указано начальное направление полета БЛА.
Для построения оптимальной траектории полета до точки разобьем полет на 2 этапа:
Полет по дуге радиусом R;
Полет по прямой до объекта.
Легко показать, что второй этап будет заключаться в полете по касательной, проведенной из точки (xO, yO) к ближайшей из окружностей, ограничивающих зону недосягаемости БЛА.
Найдем точку касания. Для этого обратимся к рисунку 1.2.2.
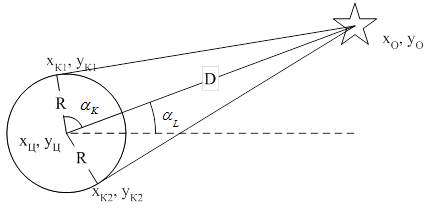
Рисунок 1.2.2 Нахождение точки касания
Найдем угол ![]() :
:

Теперь, зная этот угол, легко найти координаты точки касания:
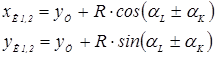
После того, как мы определили точки касания, выберем из них ту, при полете через которую мы будем двигаться в сторону объекта. Для этого введем несколько дополнительных углов (рисунок 1.2.3).
Рисунок 1.2.3 Выбор точки касания
Здесь ![]() – углы между векторами скорости БЛА и осью Х в точках касания.
– углы между векторами скорости БЛА и осью Х в точках касания.
![]() – углы между прямыми, соединяющими точки касания с объектом, и осью X.
– углы между прямыми, соединяющими точки касания с объектом, и осью X.
Далее, из двух пар ![]() –
– ![]() и
и ![]() –
– ![]() выбирается та, углы в которой совпадают по величинам. Это и будет искомая точка, через которую БЛА должен полететь, чтобы выйти на участок полета по прямой до объекта.
выбирается та, углы в которой совпадают по величинам. Это и будет искомая точка, через которую БЛА должен полететь, чтобы выйти на участок полета по прямой до объекта.
Теперь определим длину траектории, для чего введем еще один угол ![]() , характеризующий угол поворота вектора скорости от начального положения до положения, которое он займет в выбранной точке касания (Рисунок 1.2.4).
, характеризующий угол поворота вектора скорости от начального положения до положения, которое он займет в выбранной точке касания (Рисунок 1.2.4).
Рисунок 1.2.4 Нахождения угла ![]()
Теперь длину траектории можно определить как
Аналогичным образом находим длину траектории в случае полета по второй окружности. После того, как получены длины траекторий при полете по двум окружностям, выбираем ту из траекторий, длина которой будет минимальна.
Задачу учета подвижности объекта будем решать следующим образом. Мы предполагаем, что в течение того времени, за которое БЛА сблизится с объектом, последний будет двигаться прямолинейно с постоянной скоростью. Таким образом, мы можем найти точку, по прибытии в которую БЛА «встретится» с объектом. Иллюстрация этого процесса приведена на рисунке 1.2.5.
Рисунок 1.2.5 Поиск точки упреждения
Для нахождения точки упреждения мы можем записать следующие функции:
Функция, определяющая время движения объекта до одной из точек, расположенных на прямой, по которой движется объект;
Функция, определяющая время движения БЛА до вышеуказанной точки.
Таким образом, мы получаем две функции, точка пересечения которых является решением поставленной задачи (рисунок 1.2.6).
Рисунок 1.2.6 Функциональные зависимости времени перелета в точку нахождения объекта от расстояния, пройденного объектом
Теперь мы легко можем рассчитать координаты точки встречи БЛА и объекта и время перелета в эту точку.
Для учета влияния ветра при поиске оптимальной траектории следует ввести некоторые ограничения на угол крена (т.е. оставить «запас» для компенсации влияния ветра на разворотах). В конечном счете, это скажется лишь на минимальном радиусе разворота БЛА, т.к. все вышеизложенные алгоритмы способны решить задачу поиска оптимального маршрута при заданном радиусе разворота.
Теперь, когда готовы все алгоритмы поиска минимальной длины траектории перелета из текущего положения в определенную точку, мы можем решить задачу поиска оптимального маршрута БЛА по облету группы движущихся объектов. Эту задачу мы будем решать с помощью метода полного перебора.
Похожие статьи:
Локальные характеристики
автотранспортных потоков
В обобщенном смысле потоком называется совокупность автотранспортное средство (АТС), являющихся участниками движения на улично-дорожной сети (УДС). Улично-дорожная сеть, по которой перемещаются АТС, состоит из перегонов, перекрестков, Т-образных участков и системы управления. Поведение автотранспор ...
Планирование ТО и ремонтов машин на год
Число ТО и ремонтов каждого вида N, которые должны быть проведены в планируемом году для соответствующей машины, определяется расчетом по формуле (1) где - величина фактической наработки машины на начало планируемого года со времени проведения последнего, аналогичного расчетному, вида ТО и Р или с ...
Справочно-информационная работа по обслуживанию пригородных перевозок на
вокзале головной пассажирской станции
Справочные сведения должны быть исчерпывающими по содержанию, точно отражать фактическое состояние на вокзале. Необходимо, чтобы обо всех изменениях в расписании движения поездов, условиях перевозок пассажиров и работе вокзала работников справочного бюро извещали своевременно. Все изменения тот час ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация