Разработка модели одиночных действий БЛА
Для этого построим полное дерево, в котором расположим все возможные комбинации облета объектов. Таким образом, например, для трех объектов получим дерево, изображенное на рисунке 1.2.7.
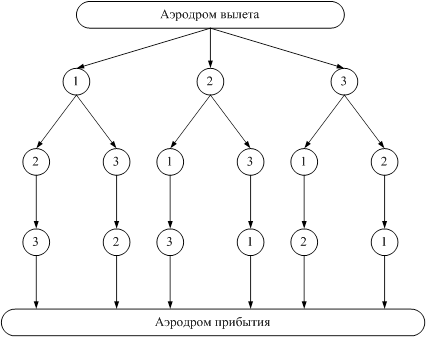
Рисунок 1.2.7 Пример дерева для трех объектов
На этом рисунке в кружках показаны номера объектов, которые на данном шаге должен пролететь БЛА.
Также следует отметить, что в случае, если при пролете ЛА над очередным объектом, в области в области обзора бортовой фотокамеры оказываются другие объекты, то они сразу же обрабатываются, а время перелета до этих объектов считается равным нулю.
Теперь, используя вышеописанные алгоритмы, найдем длины всех маршрутов и выберем из них минимальную. Этот маршрут и будет искомым.
Данный алгоритм используется для решения задачи, относящейся к классу так называемых NP-полных задач, поэтому время, затрачиваемое на ее решение, растет экспоненциально с ростом числа входных данных. Из этого следует, что данный алгоритм не подходит для включения его в состав программного обеспечения БЦВМ. Известно, что нейронные сети являются мультипараллельными структурами, позволяющими за минимальное время решать задачи аппроксимации сложных нелинейных зависимостей. Поэтому в работе предлагается заменить трудоемкий и вычислительно затратный алгоритм полного перебора на быстродействующую нейронную сеть.
Похожие статьи:
Комплексные мероприятия фактической разработки и отражения БЖД в дипломном
проекте
При проектировании мероприятий по совершенствованию технической базы школы подготовки водителей транспортных средств категории «D» были учтены все возможные потенциальные опасности и вредности учебного процесса. В первом разделе дипломного проекта выполнено технико-экономическое обоснование организ ...
Второй этап
незавершённого обгона
В данном случае обгоняющий автомобиль снижает скорость до минимально устойчивой (3 .5 м/с), V1min. Время этого этапа, t2, с, определяется: t2=tp+t3+tн+tуст (2.4) t2=0,2+0,3+1,5 +3,7=5,7 с. где tp - время реакции водителя, с, tp = 0,3 .2,0 с; t3 - время запаздывания тормозного механизма, с (для торм ...
Сведения о портах
Порт Керчь Порт Керчь самый большой порт в Азовском море, расположен у западного берега Керченского пролива . Глубины и грунт : рельеф дна ровный , грунт – ил с песком и ракушкой, якоря держит хорошо. Лоцманская служба: лоцманская проводка для всех судов обязательна, вызов лоцмана по УКВ канал 16. ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация