Локальные характеристики автотранспортных потоков
В обобщенном смысле потоком называется совокупность автотранспортное средство (АТС), являющихся участниками движения на улично-дорожной сети (УДС).
Улично-дорожная сеть, по которой перемещаются АТС, состоит из перегонов, перекрестков, Т-образных участков и системы управления. Поведение автотранспортных потоков (АТП), находящихся в движении на перегоне, определяется не только информацией о состоянии дороги и окружающих АТС, но и близостью перекрестка, светофора, наличием дорожной разметки или другого элемента управления (например, сотрудника ГИБДД в кустах).
В этом смысле удаленность от источника управления предполагает мотивацию поведения АТС только в зависимости от состояния ближайшей видимой части дороги и АТП.
Эту информацию мы называем локальной и характеристики АТП в таких условиях — локальными.
Рассмотрим часть потока АТС, совокупность автомобилей на дороге между точками А и В, движущихся в одном направлении А→В.
При этом считаем, что вклад АТС c1,c2,c3 в упомянутую часть равен доле их по длине, приходящейся на фрагмент АВ (рисунок 1).
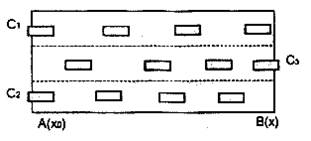
Рисунок 1 – Часть потока АТС между двумя точками А и В
Обозначим это число R(t,х,хо).
Поскольку каждый автомобиль из выделенной совокупности перемещается гладко (т.е. имеет ограниченную кусочно-непрерывную вторую производную), то функция R(t,х,хо) непрерывна по t и имеет кусочно-непрерывную производную.
Например, если считать, что скорость АТС-потока одна и та же и постоянна,
то R(t,х,хо)
кусочно-линейна по t
и определяется геометрией АТС, их расположением на дороге. Функция R(t,х,хо)
всегда кусочно-линейна и непрерывна по х.
В качестве x0
можно выбрать фиксированный параметр — начало дороги, т.е. фрагмент [x0,x]
— максимальный не содержащий перекрестков.
Функция
![]() (1)
(1)
называется интенсивностью АТП и
![]() (2)
(2)
— плотностью АТП
Для потоков с малой интенсивностью в качестве плотности и интенсивности рассматриваются их средние
 3)
3)
 (4)
(4)
Скоростью АТП называется функция
![]() (5)
(5)
![]() . (6)
. (6)
Считаем, что скорость v АТП является известной функцией его плотности [3]:
![]() , (7)
, (7)
Соотношение (7) называется далее функцией состояния АТП.
Поэтому
![]() . (8)
. (8)
![]() (9)
(9)
Уравнение (9) — локальное уравнение транспортного потока, поскольку оно адекватно описывает АТП лишь на перегоне при движении по одной полосе без обгонов вдали от средств глобального управления (перекрестки, светофоры, сужения и т.д.).
Здесь термин "управление" понимается в обобщенном смысле — как влияние на поведение АТС тех или иных ограничений для участников движения.
Далее,
![]() (10)
(10)
называется локальным ускорением АТП и характеризует внутренние ("тепловые") силы АТП.
Пусть Qi(t)
—
скорость расхода топлива i-й АТС (рисунок 1).
![]() (11)
(11)
— скорость расхода топлива потоком на фрагменте АВ полосы движения
![]() . (12)
. (12)
Пусть АТП состоит из т
типов АТС, ![]()
—
распределение типов, ![]() — вектор-функция расхода топлива каждым типом АТС в зависимости от скорости (например, усредненный показатель на 100 км). Имея вектор-функции состояния, далее можно вычислить
— вектор-функция расхода топлива каждым типом АТС в зависимости от скорости (например, усредненный показатель на 100 км). Имея вектор-функции состояния, далее можно вычислить ![]() — плотность смешанного потока.
— плотность смешанного потока.
![]() (13)
(13)
есть скорость расхода топлива единицей АТП на 100 км пути. Одной из задач, которые далее будут рассмотрены, является установление скоростного режима потока.
Функции (7) и (10) существенным образом определяют энергетику АТ-потока и, в частности, расход топлива и выбросы загрязняющих веществ.
Похожие статьи:
Технико-эксплуатационная характеристика пригородных участков ДЦС
В состав данного ДЦС входят два участка. Участки АБ – двухпутный, оборудованный трехзначной автоблокировкой, протяженностью 116 км. На участке обращаются 12 пар дальних и местных пассажирских поездов и 41 пара пригородных поездов. Участок Б-В-двухпутный, оборудованный трёхзначной автоблокировкой, п ...
Построение статических характеристик регулятора и системы
автоматического регулирования
Статическая характеристика регулятора строиться следующим образом: - в координатных осях np - h указывают заданный для расчёта установившийся режим работы 0 как исходный, с координатами , определёнными посредством формул (12), (23) и графика назначаемых индексов подачи топлива, построенного ранее н ...
Условия работы масляных систем
Надежность работы силовой установки во многом зависит от условий смазки трущихся поверхностей двигателя и достаточного отвода тепла от его агрегатов и деталей. Смазка подвижных соединений двигателя необходима для уменьшения трения и износа деталей, предохранения их от коррозии, отвода тепла, выделя ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация