Тактико-технические данные т/х «Пархоменко»
РЛС снабжена устройством контроля общей работоспособности (КОР) с дополнительной контрольной антенной, которая укреплена снаружи прибора А на кормовых курсовых углах и соединена кабелем с прибором П.
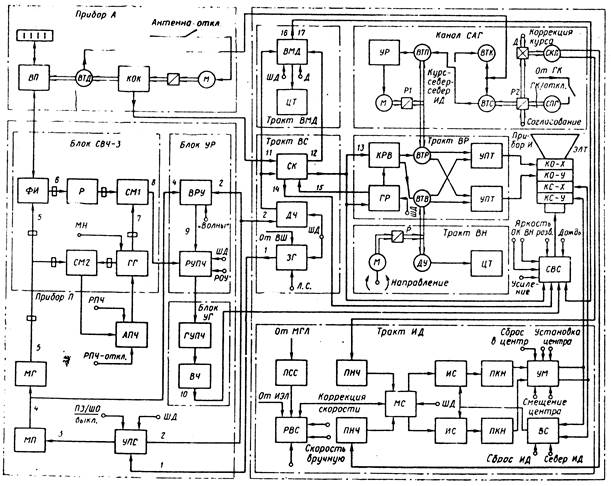
Рис. 1.2.6 Функциональная
Функциональная схема (рис. 1.2.6). Общие сведения. Функциональная схема включает в свой состав приборы (А, П, И); тракты, функционально объединяющие несколько блоков, субблоков и узлов (ВС, ВР, НМД, ВН, СВС, ИД); каналы, объединяющие несколько блоков, субблоков и узлов, но не выделяемые в таком виде в техдокументации РЛС (УПС, ПЧ, САГ); отдельные блоки (МП, СВЧ-3, АПЧ); важнейшие узлы (магнетронный генератор МГ, узел ЭЛТ).
В прибор П входят: канал управления передатчиком и синхронизации УПС, блок модулятора передатчика МП, магнетронный генератор МГ, блок СВЧ-3, канал промежуточной частоты—блоки УР (усилитель регулируемый) и УГ (усилитель главный).
Гирокомпас с косвенным управлением «Вега»
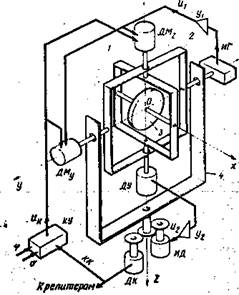
Рис. 1.2.7 Схема
На быстроходных судах и в авиации, где гирокомпас с пониженным центром тяжести чувствительного элемента имел бы недопустимо большие скоростные погрешности, применяются гирокомпасы с косвенным управлением. Принцип его работы заключается в следующем: уравновешенный гироскоп 3 (рис. 1.2.7) устанавливается в кардановом подвесе, состоящем из внутреннего вертикального кольца 1, внешнего вертикального кольца 2 и наружного вертикального полукольца 4. Карданов подвес обеспечивает гироскопу три степени свободы. Гироскоп вращается вокруг горизонтальной оси ОХ во внутреннем кардановом кольце. Внутреннее и внешнее кардановы кольца вместе с гироскопом, датчиком вертикального момента ДМz, датчиком угла ДУ, ротором датчика горизонтального момента ДМy и индикатором горизонта ИГ имеют возможность поворачиваться вокруг горизонтальной оси ОУ. Наружное полукольцо 4 может поворачиваться на любой угол относительно вертикальной оси OZ.
Если в момент включения гирокомпаса главная ось находилась в восточной половине плоскости горизонта, то под действием суточного вращения Земли она начнет видимым образом подниматься над плоскостью горизонта. Это будет замечено индикатором горизонта, который выработает сигнал, пропорциональный углу наклона главной оси. Этот сигнал усиливается усилителем У1 и подается на датчики вертикального и горизонтального моментов. Датчик горизонтального момента ДМy вызовет прецессию главной оси к западу, т.е. к плоскости меридиана, а датчик вертикального момента ДМz вызовет прецессию главной оси вниз, к плоскости горизонта. Через несколько полупериодов колебаний главная ось придет в точку динамического равновесия, которая с помощью корректирующего устройства КУ, вырабатывающего корректирующее напряжение uk, подаваемое на датчики вертикального и горизонтального моментов, может быть совмещена как с плоскостью меридиана, так и с плоскостью горизонта. Из сказанного вытекает, что датчик горизонтального момента с помощью индикатора горизонта выполняет ту же функцию, что и пониженный центр тяжести гиросферы, а датчик вертикального момента с помощью того же индикатора горизонта приводит к погашению колебаний, т.е. выполняет ту же функцию, что и гидравлический успокоитель гиросферы.
Похожие статьи:
Разработка лотка
В данном механизме применяется лоток скат коробчатого типа. При конструировании лотков-скатов коробчатого типа следует выбрать значения размеров поперечного сечения лотка, угол наклона и высоту бортов. Для решения первой поставленной задачи, т.е. для определения размеров поперечного сечения лотка, ...
Расчёт режимов наплавки
В данной работе проводились расчёты двух автоматических видов наплавки, выбранных исходя из экономических и конструкционных соображений: под плавленым флюсом и вибродуговой. Автоматическая наплавка может выполняться любым сварочным автоматом, однако удобнее применять специализированное оборудование ...
Электрическая централизация стрелок и сигналов промежуточных станций
Среди устройств железнодорожной автоматики и телемеханики системы управления объектами на станциях играют важнейшую роль. Скорость обработки поездов на станциях определяет пропускную способность железных дорог. Безопасность движения поездов во многом зависит от безопасности передвижений по станции. ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация