Моделирование работы модуля «Поиск оптимального маршрута нескольких БЛА»
Модуль нахождения оптимального маршрута для одного БЛА
Для выбранной итерации были составлены следующие оптимальные маршруты:
Первый БЛА: 1-й и 5-й – 3-й – 6-й объекты;
Второй БЛА: 7-й – 2-й – 4-й объекты.
Следует заметить, что при пролете над пятым объектом в поле видимости камеры попал первый объект, поэтому был обработан вместе с пятым.
Время работы модуля составило 31,7279 секунды.
Модуль определения минимального радиуса разворота.
Для текущих значений скорости БЛА и скорости ветра был рассчитан минимальный радиус разворота Rmin = 70 м.
Время работы модуля составило 0.000004 секунды.
Модуль запоминания оптимального маршрута
Маршрут, просмотренный на текущей итерации, сохранен для дальнейшей обработки.
Время работы модуля составило 0,0008 секунды.
Результаты работы системы
В результате работы системы было выбрано оптимальное распределение объектов и составлены оптимальные маршруты их облета двумя БЛА. На рисунке 1.5.3 изображены выбранные маршруты, а также показаны начальные пункты движения БЛА (они изображены в виде самолетов), конечные пункты движения первого и второго БЛА – К1 и К2 соответственно, начальные положения и направление движения объектов (они изображены в виде черных окружностей), а также точки «обслуживания» объектов (они изображены синими точками). Красные непрерывные линии показывают траектории движения БЛА по оптимальным маршрутам. Время работы всей системы составило 172.4834 секунды.
Таким образом, результаты моделирования показывают, что разработанная программа является работоспособной и маршруты, рассчитываемые с помощью нее, являются оптимальными. Пример дерева, по которому находится минимальный маршрут, приведен на рисунке 1.5.4. Рядом с каждой вершиной выводится время, необходимое для встречи с данным объектом, если БЛА будет следовать по маршруту, соответствующему исследуемой ветви дерева. Красным цветом указана ветвь дерева, соответствующая оптимальному маршруту.
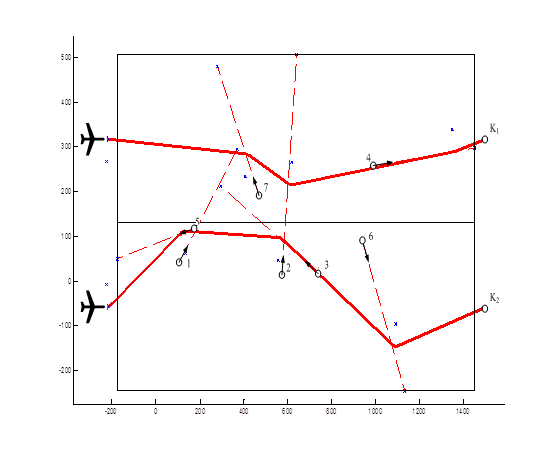
Рисунок 1.5.3 Результат выполнения модуля «Поиск оптимального маршрута для нескольких БЛА»
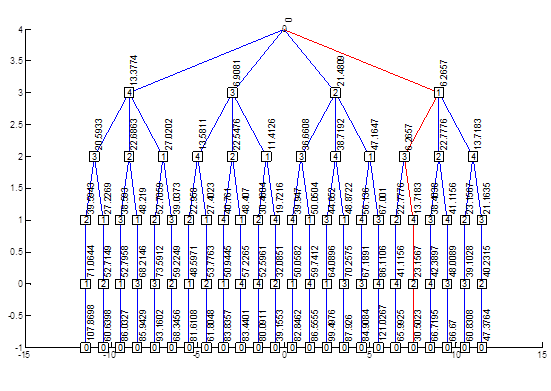
Рисунок 1.5.4 Дерево перебора всех вариантов облета для первого БЛА (соответствие значений, указанных на вершине номерам объектов: «1» – 5-й объект, «2» – 6-й объект, «3» – 1-й объект, «4» – 3-й объект)
Моделирование работы системы с использованием нейронной сети и анализ результатов
Смоделируем работу созданной нейронной сети в среде Matlab с использованием встроенной утилиты nntool, предназначенной для работы с нейронными сетями.
При подготовке обучающих данных для данной нейронной сети учтем, что они должны быть нормированы для того, чтобы все параметры, подаваемые на вход нейронной сети, имели равный вес в процессе принятия решения. Также следует учесть тот факт, что подготовка полной обучающей выборки для данной нейронной сети без использования вычислительных сетей и мощных вычислительных станций займет довольно продолжительное время, поэтому для проверки работы нейронной сети учтем некоторые допущения:
скорости движения БЛА и объектов постоянны и заданы заранее;
объекты движутся в том же направлении, что и БЛА;
количество объектов равно трем.
Таким образом, сгенерируем обучающую выборку для данной нейронной сети, изменяя нормированные значения относительных координат в пределах от 0 до 1 с шагом 0,1.
В ходе разработки и моделирования работы данной нейронной сети количество нейронов в скрытом слое было выбрано равным 35. Таким образом, данная нейронная сеть имеет структуру 14–35–3.
Моделирование данной нейронной сети производилось на ПЭВМ со следующими характеристиками:
Тактовая частота процессора: 2 ГГц;
Количество ядер процессора: 1;
Объем памяти: 1,5 Гб.
Процесс генерации данной обучающей выборки занял 8 часов.
Процесс обучения нейронной сети закончился с ошибкой, равной 10-2, что является хорошим результатом для данной нейронной сети. Промоделируем теперь работу данной нейронной сети и сравним ее результаты с результатами, выдаваемыми исходным алгоритмом.
Похожие статьи:
Полная масса и грузоподъемность АТС
Полная масса автотранспортных средств состоит из снаряженной массы, массы груза (по грузоподъемности) или пассажиров (по числу мест), их багажа, водителя и другого обслуживающего персонала. Полная масса автопоездов: для прицепного поезда – сумма полных масс тягача и прицепа; для седельного – сумма ...
Рессорное подвешивание
Для смягчения толчков и ударов, возникающих при движении тепловоза по рельсовому пути, служит рессорное подвешивание. На рассматриваемых тепловозах рессорное подвешивание одноступенчатое, т. е. оно расположено только между рамами тележек и колесными парами. Передача веса на каждую ось осуществляетс ...
Анализ состояния безопасности
жизнедеятельности в ОАО «Слободка-агро»
Ежедневно на производстве актуальна тематика гласящая, что охрана труда - задача номер один при современном развитии производственных мощностей и техники. Постоянное техническое, перевооружение сельского хозяйства и других отраслей агропромышленного комплекса, возрастающий уровень механизации, хими ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация