Расчет механизма передвижения крана
Механизм передвижения выполняем с раздельным приводом от асинхронных двигателей с фазным ротором. Половина колес выполняются приводными. Ходовые колеса - двухребордные, смонтированные на подшипниках качения.
Конструктивно механизм передвижения выполнен в виде скрепляемых с основанием стоек опор одноколесных балансирных тележек. Тележки соединены с опорами с помощью болтовых фланцев. Механизм передвижения комплектуем зубчатым цилиндрическим редуктором. Редуктор навешиваем на конец вала колеса (рисунок 7). В этой схеме исключена консольная нагрузка, отсутствуют быстроизнашивающиеся и требующие регулярного ухода открытые передачи.
Такие механизмы наиболее эффективны при использовании фланцевых электродвигателей и креплении тормоза непосредственно на двигатель. На данном козловом кране применены кованые колеса на вращающихся валах, подшипники которых посажены в расточках угловых букс. Выбираем колеса диаметром 500 мм, максимальное давление 600 кН. Их достоинством является простота демонтажа и монтажа. В кране применяем упрощенные буксовые узлы (с цилиндрическими сборными буксами). Такие узлы применяем в балансирных тележках, так как это позволяет получить необходимую точность установки ходовых колес путем расточки рам тележек.
Рама тележки проектируемого крана выполнено из балок швеллерного сечения, к которым приварен кронштейн наклонного соединительного фланца. В щеках кронштейна посажена ось для крепления монтажного полиспаста. С противоположной стороны предусмотрены кронштейны с вертикальной осью для крепления противоугонного захвата. Ось ходового колеса посажена в усиленных накладками расточках швеллеров.
Вал ведущего колеса открытой передачи, вращающихся в двух опарах, соединен с выходным валом редуктора зубчатой муфтой. Такое соединение удобно для сборки и ремонта. Точность зацепления обеспечивается специальным сборочным накладным кондуктором, который базируется на расточке для оси ходового колеса. По этому кондуктору на контрольных штифтах устанавливают и задаривают по месту пальцы крепления корпусов подшипников вала. После установки ходового колеса и вала монтируют остальные механизмы.
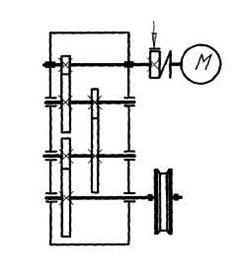
Рисунок 3.5 - Кинематическая схема механизма передвижения
Для установки редуктора, двигателя и тормоза к их лапам на болтах крепят гнутые подставки, после установки и регулирования механизмов эти подставки приваривают. Это значительно уменьшает трудоемкость изготовления привода, так как исключает разметку и сверление отверстий под крепящие болты, и регулирование по высоте с помощью прокладок. Все механизмы закрыты съемными кожухами.
При передвижении на пилоны крана действуют статические и динамические силы. Металлоконструкция крана испытывает толчки, на неё действуют порывы ветра.
Рассчитаем постоянные нагрузки, действующие на кран.
Т.к. скорость передвижения крана 35 м/мин, то нагрузка от веса
![]() , тс (1),
, тс (1),
где ![]() - нагрузка от веса крана и веса груза;
- нагрузка от веса крана и веса груза;
![]() - коэффициент приведения;
- коэффициент приведения;
![]() ;
;
![]() , тс (3.64)
, тс (3.64)
где ![]() - вес крана, т;
- вес крана, т;
![]() тс;
тс;
![]() - вес груза, т;
- вес груза, т;
![]() тс - отнесём к постоянным нагрузкам.
тс - отнесём к постоянным нагрузкам.
![]() тс.
тс.
На один пилон крана действует нагрузка
![]() тс.
тс.
Вес груза учитываем с введением поправочного коэффициента динамичности
![]() (3.65),
(3.65),
где ![]() - коэффициент динамичности;
- коэффициент динамичности;
![]() - возможное ускорение, определяемое действительной характеристикой электродвигателя или тормоза;
- возможное ускорение, определяемое действительной характеристикой электродвигателя или тормоза;
![]() - вертикальное опорное давление, тс.
- вертикальное опорное давление, тс.
Вертикальное опорное давление ![]() равно сумме массы крана и массы груза
равно сумме массы крана и массы груза ![]() тс.
тс.
Рассчитаем ветровую нагрузку
Ветровая нагрузка ![]() - определяется как сумма статической и динамической составляющей для вертикального опорного давления ветрового района при динамическом давлении ветра
- определяется как сумма статической и динамической составляющей для вертикального опорного давления ветрового района при динамическом давлении ветра
Похожие статьи:
Выбор методов организации технологического процесса ТО автомобилей
От принятых методов зависит трудоемкость ТО. Методы организации технологического процесса ТО автомобилей выбираются с использованием данных табл.8 «Учебного пособия». При этом учитываются следующие факторы: 1) Эксплуатируемые автомобили относятся к технологически совместимым группам, что позволяет ...
Особенности перевозок
К управлению автотранспортом допускаются лица, прошедшие спецподготовку, вводный инструктаж, инструктаж по пожарной безопасности, первичный инструктаж на рабочем месте, инструктаж по электробезопасности на рабочем месте. Особенностью перевозок в МУП САХ является то, что на всех «Мусоровозах» устано ...
Эксплуатационно-технические требования к кодам АЛС
В соответствии с Инструкцией по техническому обслуживанию устройств сигнализации, централизации и блокировки проверка работы устройств АЛС проводится периодически вагонами-лабораториями с рассмотрением результатов совместно службами сигнализации и связи и локомотивного хозяйства 2 раза в год. Прове ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация