Выбор оптимальных параметров системы управления высотой полёта
Выберем ![]() =0.8 c
=0.8 c
Была составлена программа в пакете Matlab
Для переходного процесса с перерегулированием (ξ=0.707)
clc
syms x y iteta ih
V=265.68;
H=11000;
cdteta=0.645;
cdalpha=0.105;
calpha=2.63;
balpha=0.632;
cv=29.275;
idteta=0.8;
ksi=0.707;
tp=21;
tau2=tp/3;
a0=1;
a1=cdteta+cdalpha+balpha+cv*idteta
A=balpha*(cdteta+cv*idteta)+calpha
Res=solve((a1*x*((x*y)^0.25))/(tau2)+((1-(a1/balpha))*((1+x-y)/(tau2^2))*sqrt(x*y))-x*(x-y)*A,1-x-y);
x=double(Res.x);
y=double(Res.y);
tt=find(x>0&y>0&x-y>0&x+y<=1&imag(x)==0);
x=x(tt)
y=y(tt)
a3=(a1*(1+x-y)*sqrt(x*y))/((tau2^2)*x*(x-y))
a4=(a1*(x*y)^0.75)/((tau2^3)*x*(x-y))
a2=(a3/balpha)+A
В итоге получили следующие результаты:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
По известным коэффициентам ![]() из системы (7.4) нашли передаточные числа автопилота:
из системы (7.4) нашли передаточные числа автопилота:
![]() ;
;
![]() c;
c;
![]() град/м.
град/м.
Необходимо знать, имеют ли место нули в числителе передаточной функции. Нули в числителе могут увеличить время переходного процесса. Чтобы узнать о наличии нулей в числителе запишем частный определитель:
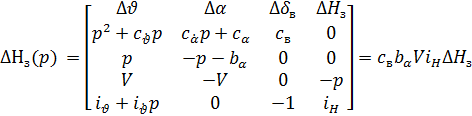 .
.
Таким образом, передаточная функция запишется в следующем виде:
![]() .(9.14)
.(9.14)
Как видно из формулы (9.14) нулей в числителе передаточной функции нет.
На рисунке (9.1) представлен график переходного процесса системы (9.14)
На управляющее воздействие ![]() =60м
=60м
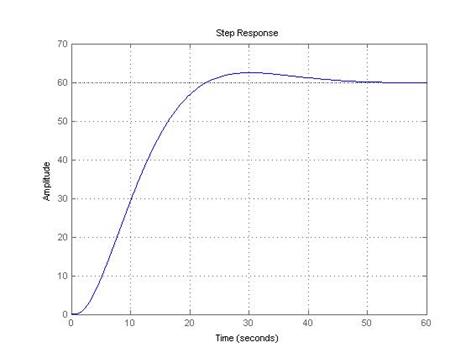
Рис 9.1
Как видно из рис 9.1 время регулирования по высоте полета равно 21с. Таким образом, мы обеспечили необходимое качество регулирования высоты полета.
Для переходного процесса без перерегулирования (ξ=1)
clc
syms x y iteta ih
V=265.68;
H=11000;
cdteta=0.645;
cdalpha=0.105;
calpha=2.63;
balpha=0.632;
cv=29.275;
ksi=1;
xp=0.5;
a0=1;
idteta=0.4;
tp=20
a1=cdteta+cdalpha+balpha+cv*idteta
tau2=tp/4.74
A=balpha*(cdteta+cv*idteta)+calpha
Res=solve((a1*x*((x*y)^0.25))/(tau2)+((1-(a1/balpha))*((1+x-y)/(tau2^2))*sqrt(x*y))-x*(x-y)*A,-y+((sqrt(x)-1)^2));
x=double(Res.x);
y=double(Res.y);
tt=find(x>0&y>0&x-y>0&x+y<=1&imag(x)==0);
x=x(tt)
y=y(tt)
a3=(a1*(1+x-y)*sqrt(x*y))/((tau2^2)*x*(x-y))
a4=(a1*(x*y)^0.75)/((tau2^3)*x*(x-y))
В итоге получили следующие результаты:
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
По известным коэффициентам ![]() из системы (7.4) нашли передаточные числа автопилота:
из системы (7.4) нашли передаточные числа автопилота:
Похожие статьи:
Параметры
функции плотности распределения отказов
Делаем предположение, что по виду полигона данное распределение отказов описывается экспоненциальной функцией: (3.1) Эта функция, определяющая скорость нарастания отказов, является однопараметровой, т. к. зависит только от интенсивности потока отказов l: (3.2) Интенсивность потока отказов: - для вн ...
Метод расчета и расчетные усилия
Расчет выполняется методом конечных элементов машинным способом в конечно-элементном пакете ИСПА (Интегрированная Система Прочностного Анализа). В качестве расчетных усилий приняты нагрузки, предоставленные 52 отделом – смотри рисунок 1 (лист 7), где: Р1=4000 кгс; Р2=16000 кгс4 Р3=4000 кгс; α= ...
Разработка схемы учебного маршрута движения транспортного средства
Безопасное дорожное движение может осуществляться только высококвалифицированными водителями, обучение которых должно обеспечиваться применением эффективных средств и методов. Постоянно растущая интенсивность дорожного движения диктует необходимость проведения обучения вождению в условиях реальной ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация