Система АПК-ДК
Аппаратно-программный комплекс диспетчерского контроля (АПК-ДК) является наиболее удачной реализацией функций диспетчерского контроля на современном техническом уровне.
Использование средств вычислительной техники расширило функциональные возможности системы АПК-ДК не только для поездного диспетчера, но позволило решить и основные задачи контроля состояния технических средств систем ЖАТ на перегонах и станциях диспетчерского участка.
Таким
образом, система АПК-ДК имеет двойное назначение и обеспечивает:
оперативный съем информации на сигнальных точках перегонов о состоянии рельсовых участков, светофоров и других средств и передачу ее на станции для последующего использования для контроля поездного положения и технического диагностирования перегонных устройств;
оперативный съем информации на станциях о состоянии путевых объектов и технических средств и передачу ее поездному диспетчеру и диспетчеру дистанции сигнализации, связи и вычислительной техники;
обработку и отображение информации у пользователей по ведению исполняемого графика движения; расчету прогнозного графика по текущему поездному положению; расчету показателей работы участка и выдаче справок; логическому определению ложной свободности участка и опасного сближения поездов; анализу работы устройств; определению предотказного состояния устройств; обнаружению отказа; оптимизации поиска и устранению отказа; архивации и восстановлению событий; статистике и учету ресурсов приборов.
На станциях, т.е. на первом (нижнем) уровне управления перевозочным процессом (рис. 5) выполняются сбор, преобразование, концентрация информации о состоянии перегонных и станционных устройств. Далее эта информация может быть отображена на АРМах дежурного по станции и дежурного электромеханика, но обязательно передается на второй уровень управления, т.е. поездному диспетчеру, и на АРМ
диспетчера дистанции сигнализации, связи и вычислительной техники.
Состояние перегонных устройств систем ЖАТ контролируют автоматы контроля сигнальных точек (АКСТ), выполненные на базе специализированных контроллеров. Наибольшее распространение имеет блок АКСТ-СЧМ, представляющий собой генератор частоты, формирующий посылаемые в линию связи циклические восьмиимпульсные частотные посылки в соответствии с состоянием контролируемых объектов. При восьми выходных импульсах благодаря манипуляции по длительности импульсов и пауз (интервалов) АКСТ-ЧМ позволяет контролировать состояние семи дискретных датчиков (реле) и двух пороговых датчиков.
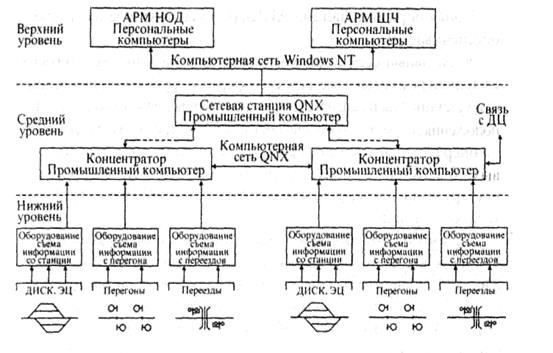
Рис. 5. Структурная схема системы АПК ДК
При этом соблюдаются следующие правила:
длительность импульса в один такт соответствует замкнутому состоянию контакта датчика и состоянию «параметр в норме» порогового датчика;
длительность импульса в два такта соответствует разомкнутому состоянию контактного датчика и состоянию «параметр не в норме» порогового датчика;
длительность разделительного интервала между импульсами в один такт соответствует разомкнутому состоянию датчика;
длительность разделительного интервала в два такта соответствует замкнутому состоянию датчика;
длительность паузы между посылками восьмиимпульсных комбинаций установлена равной трем тактам;
длительность такта (0,468 ± 0,007) с.
При проектировании АПК-ДК определяется перечень параметров, контролируемых каждым АКСТ-СЧМ.
Для систем автоблокировки параметры выбирают из следующего перечня: отсутствие основного питания на сигнальной точке; отсутствие резервного питания; перегорание основной нити лампы красного огня; перегорание резервной нити лампы красного огня; перегорание нити лампы разрешающего огня; установленное направление движения; сход изолирующего стыка; пропадание постоянного напряжения блока БС-ДА; занятость блок участка; неисправность АКСТ-СЧМ или линии ДСМ; пропадание обоих фидеров питания на объектах с аккумуляторным резервом; аварийный отказ.
Похожие статьи:
Выпускной коллектор
Как видно на примерах использования этих двух вариантов газотурбонаддува, работа турбины, прежде всего, зависит от геометрии и конструкции выпускного коллектора. Если необходимо получить хороший коэффициент полезного действия турбины, то следует по-настоящему отрегулировать отдельные выпускные пото ...
Классификация видов услуг
На борту воздушных судов для пассажиров предоставляется огромное множество услуг. Услуги на борту можно поделить на: номинальные, включенные в стоимость авиабилета дополнительные. От классности обслуживания будет зависеть какие услуги будут являться номинальными, а какие дополнительными. Международ ...
Определение основных
параметров локомотива
К основным параметрам локомотива, характеризующим его как тяговую единицу подвижного состава, относятся мощность, сила тяги на ободе колеса, служебная масса, сцепной вес, число колесных пар, нагрузка от колесной пары на рельсы, расчетная скорость, линейные базовые и габаритные размеры. Основные тех ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация