Система АСДК
Автоматизированная система диспетчерского контроля (АСДК) представляет собой аппаратно-программный комплекс, обеспечивающий диспетчерский контроль состояния отдельных узлов и устройств автоматики, телемеханики и связи, поездных передвижений, свободности и занятости приемоотправочных путей, рельсовых цепей и блок участков, состояния переездов, входных и выходных светофоров станций и др.
Условно АСДК разделяется на две подсистемы верхнего и нижнего уровней. Объектами контроля АСДК являются устройства ЭЦ на станциях и устройства интервального регулирования на перегонах.
Подсистема нижнего уровня состоит из электрических датчиков состояния контролируемых технических средств (контакты соответствующих реле постовых и перегонных устройств, измерительные панели рельсовых цепей и др.) и контроллеров диспетчерского контроля (КДК), выполняющих сбор цифровой и аналоговой информации, ее обработку и передачу в сеть АСДК.
Контроллер диспетчерского контроля представляет собой многопроцессорную систему, построенную по магистрально-модульному принципу с широкой номенклатурой модулей, обеспечивающих контроль дискретных устройств, а также аналоговых сигналов: измерение напряжений питающих установок и путевых реле различных рельсовых цепей, включая тональные; измерение длительности и частоты сигналов.
В качестве магистрали КДК используется асинхронная, последовательная шина. Децентрализованная внутренняя магистраль позволяет разнесением отдельных модулей сократить объем работ по монтажу и затраты на кабельную продукцию.
Такой подход в построении технических средств позволяет повысить живучесть системы в целом, обеспечить возможность дублирования элементов и резервирования каналов связи, решать на нижнем уровне задачи, требующие значительных вычислительных ресурсов, в том числе по поддержке протоколов глобальных сетей.
Для обеспечения съема и передачи на станции дискретных и аналоговых сигналов от сигнальных и переездных установок аппаратура нижнего уровня содержит:
модуль линейный аналоговый (МАЛ), предназначенный для сбора и преобразования в цифровой код аналоговой информации от восьми контролируемых устройств;
генератор линейных сигналов (ГЛС), служащий для сбора дискретных сигналов от 15 контролируемых устройств (контакты реле) я реле состояния блок участка (переезда). Кроме того, ГЛС принимает цифровой код измеренных аналоговых величин и передает его в линию в виде последовательного циклического кода (рис. 2).
Линейные выходы всех генераторов линейных сигналов (до 24) подключаются параллельно к двухпроводной линии связи (кабельной или воздушной), например ДСН.
Одновременная передача информации с 24 сигнальных установок в общую линию связи основана на частотном разделении каналов. Кодирование информации о состоянии 15 контролируемых устройств или аналоговой информации каждым ГЛС выполняется по принципу временного разделения каналов. Состояние каждого контролируемого устройства (контакта реле) или код аналоговой информации передается в дискретной форме модулированными по длительности паузами между частотными посылками. Одновременно модулированными по длительности частотными посылками посылается информация о состоянии блок участка (переезда).
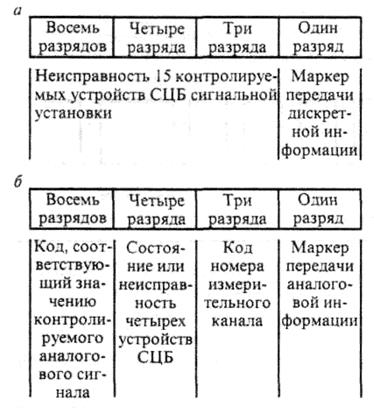
Рис. 2. Структура последовательного кода при передаче дискретной (а) и аналоговой (б) информации
При наличии аналоговой информации от МАЛ на входах ГЛС последовательный циклический код линейного сигнала содержит 4 байта (2 байта дискретной информации и 2 байта аналоговой). За один цикл передачи информации ГЛС передает код о напряжении одного аналогового сигнала. Во втором байте последовательного кода, содержащего аналоговую информацию, включено сообщение о состоянии четырех информационных каналов для сокращения времени получения данных по этим каналам. При передаче любого сообщения модулированными по длительности частотными посылками посылается информация о состоянии блок участка (переезда). При передаче дискретной информации ГЛС формирует импульсную последовательность циклического кода (рис. 3). На этом рисунке Ч — частотная посылка; Б — бесчастотная посылка (пауза).
Информация от каждой сигнальной установки по линии связи (например, ДСН с развязкой конденсаторами от цепей постоянного тока) поступает на станционную приемную аппаратуру и выделяется полосовыми фильтрами модулей приемных каналов ПК. После дешифрации принятого сигнала ПК выставляет информацию я последовательную интерфейсную шину RS-232 для использования аппаратурой верхнего уровня АСДК (рис. 4.) При необходимости, по этому же стыку, информация может быть выведена на модули индикации.
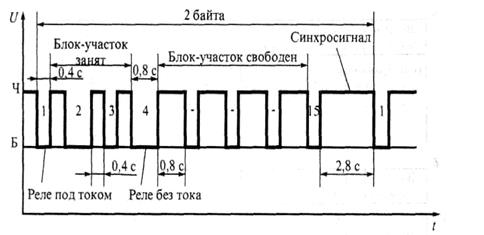
Рис. 3. Структура циклического кода линейного сигнала при передаче дискретной информации
Подсистема верхнего уровня выполняет прием и маршрутизацию потоков информации от КДК, ее обработку и отображение на АРМах сети АСДК. Кроме того, на этом уровне осуществляется связь с внешними вычислительными системами, в том числе с АСОУП и автоматизированной системой службы СЦБ (АС-Ш). В состав подсистемы верхнего уровня входят различные технологические АРМы пользователей (поездного и узлового диспетчеров, сменного инженера дистанции сигнализации и связи, дежурного по станции, электромеханика постов ЭЦ и ГАЦ, диспетчера локомотивного депо, дежурного по пассажирским и грузовым паркам и др.). Все АРМы АСДК поддерживают единый протокол обмена. Сеть АСДК выполняет функции электронной почты и открыта для подключения АРМов других разработчиков. Система ориентирована на работу в центре управления и совместно с АС-Ш.
Похожие статьи:
Привод сцепления
Выключение сцепления на ВАЗ-21083 осуществляется через беззазорный механический привод. Беззазорный привод сцепления имеет следующие особенности в устройстве: - в приводе отсутствует сервомеханизм, поэтому у педали сцепления нет рычага сервомеханизма, а на кронштейне педалей сцепления и тормоза нет ...
Развитие контейнерных грузоперевозок в России
Рис. 1.1. Основные направления грузопотоков. На карте обозначены только основные направления грузопотоков, в которые вовлечены порты России, а также сопредельных стран удобных с точки зрения довозки наземным транспортом. К основным грузопотокам прежде всего следует отнести направления, связывающие ...
Противокоррозионные и противоизносные характеристики
дизельных топлив
дизельный топливо цетановый антинагарный Коррозионные свойства дизельных топлив связаны с присутствием в нем минеральных (водорастворимых) и органических кислот, щелочей, сернистых соединений и воды. Присутствие активных сернистых соединений в топливе определяется пробой (коррозией) на медной пласт ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация