Устройство эскалатора типа ЭТ2
подъемник эскалатор устройство
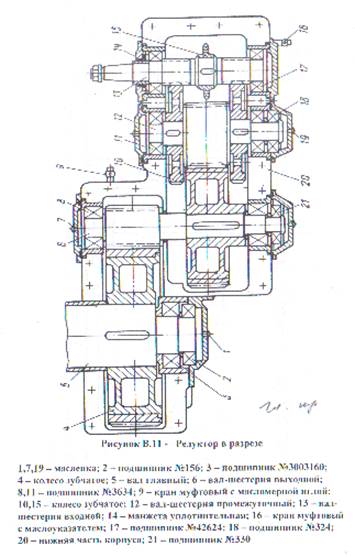
Главный привод эскалатора ЭТ-2 предназначен для передвижения лестничного полотна с эксплуатационной скоростью 0,75 м/с. Привод ЭТ-2 (ЭТ-2М) состоит из главного электродвигателя, муфты с рабочими тормозами, быстроходного редуктора, главного вала эскалатора вместе с тяговыми звёздочками и аварийным тормозом.
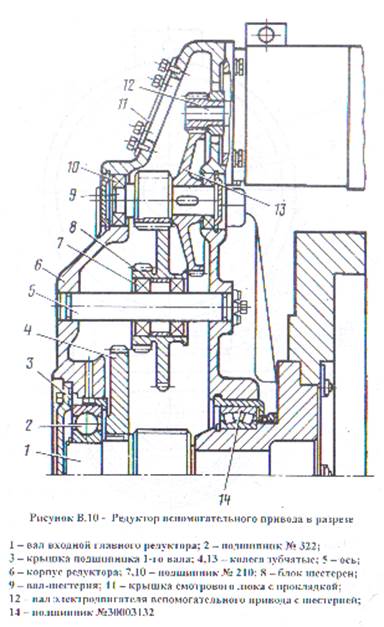
Вспомогательный привод эскалатора предназначен для передвижения лестничного полотна с ремонтной скоростью 0,04 м/с при монтажных и демонтажных работах, а так же при растормаживании аварийного тормаза.
Тормозная система состоит из рабочего и аварийного тормоза. Рабочий тормоз нормально-замкнутого действия установлен на входном валу редуктора и действует при каждом отключении главного и вспомогательного привода, а также при обесточивании цепи управления.
Эскалатор ЭТ2 оборудован автоматически действующим аварийным тормозом, расположенным на главном приводном валу. Аварийный тормоз должен остановить эскалатор, работающий на спуск, в случае увеличения скорости лестничного полотна на 30% и более от номинальной скорости, а также при самопроизвольном изменении направления движения лестничного полотна, работающего на подъем эскалатора и при отказе рабочего тормоза.
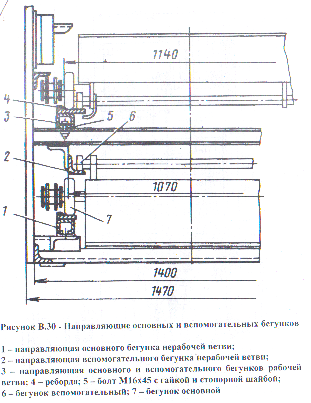
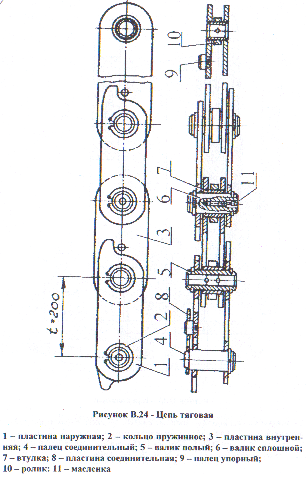
Лестничное полотно состоит из большого количества ступеней, представляющих собой тележки на четырех колёсах, движущихся по направляющим путям (трассе). С обоих сторон ступени соединены между собой цепями. Ступени крепятся к цепям полым шарниром цепи, надетым на цапфу оси ступени. Таком образом, ступень шарнирно связана с цепью, может вращаться на оси и, следовательно, принимать любое положение на оси относительно цепи в вертикальной плоскости в зависимости от конфигурации трассы направляющих путей. Шарнирное крепление ступеней позволяет лестничному полотну образовать на входе и выходе с эскалатора горизонтальные площадки, удобные для пассажира.
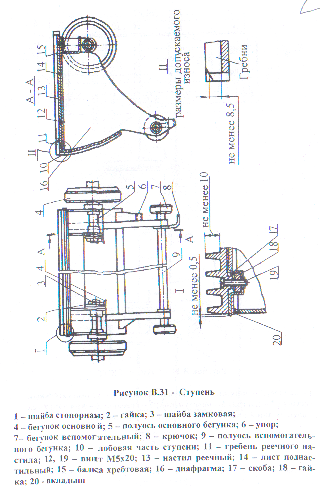
Для безопасности входа на эскалатор и выхода с него горизонтальная поверхность ступеней имеет настил с выступающими гребнями, расположенными на равном расстоянии одна от другой. Поступёнок имеет вертикальные выступы и впадины, которые в сочетании с выступами и впадинами настила образуют лабиринт. НА входе и выходе с эскалатора предусмотрены неподвижные наклонные площадки с зубцами, которые попадают в промежутки между гребнями настила ступеней. Такое устройство обеспечивает безопасный переход пассажира с эскалатора в вестибюль.
Рабочая ветвь лестничного полотна и поручней отделена от механизмов и металлоконструкций эскалатора прочной жёсткой гладкой и трудно сгораемой облицовкой – балюстрадой. Конструкция балюстрады легко разборная в местах, требующих технического обслуживания. Перепады плоскостей между элементами балюстрады со стороны лестничного полотна более 3 мм не допускается. Стыки фартуков не должны иметь перепадов более 0,5 мм и должно быть исключено их взаимное смещение.
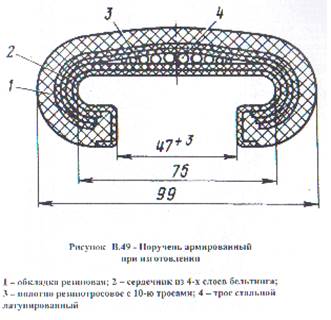
По обеим сторонам эскалатора на балюстраде устроен движущийся поручень. Скорость движения поручня не должна отличаться от скорости движения ступеней более чем на 2%.

Поручень представляет собой С – образный профиль.
Эскалатор оборудован блокировочными устройствами, отключающими электродвигатели с остановкой лестничного полотна при:
– обрыве, чрезмерной вытяжке или остановке поручня,
– перемещении одной или двух звездочек каретки натяжной станции в сторону привода или в обратную сторону более 30 мм.,
– отвинчивании гайки или выходе винта аварийного тормоза.
– срабатывании рабочего или аварийного тормозов,
– запасе хода якоря электромагнита рабочего тормоза менее регламентированного,
– подъеме входной площадки,
– воздействия на устройство «стоп» в любом месте прохода между эскалаторами или за щитами балюстрады, а также на выключателе «стоп»,
Похожие статьи:
Выбор и обоснование восстановления направляющей
гидравлического гасителя колебаний КВЗ-ЛИИЖТ
Гаситель в сборе поступает в участок ремонта, где его очищают, промывают в моечной машине струйного типа, при этом гасители подвешивают на штырях за верхнюю головку на стеллаже для обеспечения «растянутого» положения. После этой операции гасители обтирают, обсушивают. Гаситель после этого поступает ...
Тяговый расчёт автомобиля
Задачей тягового расчета является нахождение основных параметров двигателя и трансмиссии, обеспечивающих автомобилю необходимые основные показатели тягово-скоростных характеристик: силы тяги на ведущих колесах, скорость и ускорение движения и другое, время и путь разгона автомобиля на горизонтально ...
Технологическая планировка производственных зон и участков
Планировочные решения зоны хранения автомобилей определяем типом стоянки, способом размещения автомобиле-мест хранения и геометрическими размерами стоянки. Имея в наличии подвижной состав, состоящий из грузовых автомобилей и автопоездов и расположением в умеренно-климатическом районе, предусматрива ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация