Расчёт и проектирование лебёдки вспомогательного подъема
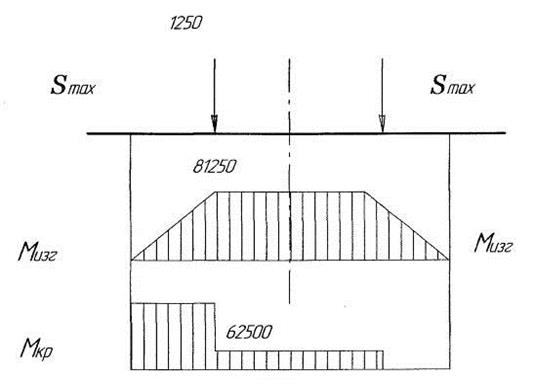
Рисунок 3.3 – Эпюры изгибающего и крутящего моментов
Выбор электродвигателя и редуктора
Определяем мощность двигателя при подъеме номинального груза согласно формуле (3.19)
![]() кВт
кВт
Принимаем общее значение КПД редуктора ![]() , [11].
, [11].
Выбираем стандартный двигатель с близкими параметрами к расчётным. Принимаем двигатель мощностью ![]() кВт при скорости вращения под нагрузкой
кВт при скорости вращения под нагрузкой ![]() об/мин. Выбираем двигатель МТВ-611-10, [4].
об/мин. Выбираем двигатель МТВ-611-10, [4].
Маховый момент ротора ![]() кг ∕м2
кг ∕м2
Вес двигателя 50 кГ. Кратность максимального момента ![]() .
.
Общее передаточное число редуктора определяем согласно формуле (3.20)
По [4] выбираем крановый редуктор типа РМ, имеющий передаточное число ![]() и мощностью
и мощностью ![]() кВт при
кВт при ![]() об/мин и среднем режиме работы. Для механизма подъема расчетный момент, передаваемый редуктором, принимается равным наибольшему статическому моменту при установившемся движении при подъеме.
об/мин и среднем режиме работы. Для механизма подъема расчетный момент, передаваемый редуктором, принимается равным наибольшему статическому моменту при установившемся движении при подъеме.
Наибольший момент, передаваемый редуктором, не должен превышать допустимого момента ![]() согласно [6].
согласно [6].
![]() - наибольший момент, передаваемый редуктором, определяем по формуле (3.21)
- наибольший момент, передаваемый редуктором, определяем по формуле (3.21)
![]() кВт
кВт
![]() кг м
кг м
Определяем тормозной момент по формуле (3.23)
![]() кг м
кг м
Выбираем колодочный тормоз с электрогидравлическим приводом. Принимаем по [6] тормоз ТКТГ-200 с одноштоковым электрогидравлическим толкателем и с максимальным тормозным моментом 15 кг∕ м.
Похожие статьи:
Компоновка главного производственного корпуса ремонтного предприятия
При проектировании специализированных предприятий по ремонту дорожных машин и их агрегатов необходимо соблюдение условий технологической взаимосвязи, а также действующих норм строительного, санитарного и противопожарного проектирования. Технологическую компоновку главного производственного корпуса ...
Навигационно-гидрографические условия
Общие сведения. Черное море – средиземное море Атлантического океана – является самым восточным из морей и представляет собой вытянутый с запада на восток глубокий водоем между Европой и Малой Азией. Наибольшая длина по параллели 42° 30¢ северной широты от вершины Бургасского залива до Кавказс ...
Линейные перевозки грузов
Международные линейные сообщения организуются морскими перевозчиками на устойчивых географических направлениях международной торговли готовой промышленной продукцией, полуфабрикатами, продовольствием и другими товарами. Международные линии связывают между собой основные мировые экономические центры ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация