Диагностирование асинхронных электродвигателей
Для диагностики асинхронных электродвигателей в оперативном режиме в настоящее время используются несколько способов диагностики, среди которых наиболее распространен метод виброакустической диагностики . В этом направлении активно проводятся исследования и разработки научно исследовательскими институтами Военно-промышленного комплекса Санкт-Петербурга, которые были объединены в акционерное общество "Технические Системы и Технологии". Главным недостатком такого метода является необходимость использования специальных виброакустических датчиков и сложность их установки. Специалистами Московского Центра электромагнитной безопасности был разработан метод спектрального анализа потребляемого тока . Достоинство этого метода по сравнению с предыдущим - возможность контроля состояния как механических, так и электрических частей электродвигателей по электрическому параметру, а в частности, по сигналу потребляемого тока, что значительно упрощает установку схемы для диагностики и избавляет от необходимости введения специальных датчиков. Особенно подобные методы распространены за рубежом . Суть данного метода заключается в анализе спектра гармоник тока потребляемого электродвигателем, путем выявления периодически повторяющихся изменений сигнала на графике, соответствующих конкретному виду повреждения электродвигателя. Однако из-за появлений ложных гармоник сигнала при различных помехах электрической сети, с подключенной к ней электродвигателем, возможны неверные результаты диагностики. В дополнение к этому неизвестно каким будет график спектрального анализа тока при нестабильном напряжении в сети.
Современные электротехнические средства, базирующиеся на использовании программируемых микроконтроллеров, позволяют наиболее гибко реализовать защиту и функциональную диагностику электродвигателей, по их электрическим параметрам.
Наиболее удачным методом является использование программно-аппаратного комплекса, который изображен на рис. 1, состоящего из компьютера и цифрового устройства-посредника, производящего необходимые измерения и передаваемого их в компьютер. В качестве измеряемых электрических величин могут быть оперативный ток, потребляемая мощность и т.д. Программа, выполняемая на компьютере, должна, в свою очередь, определенным образом обработать входную информацию и определить наиболее вероятный вид повреждения работающего электродвигателя или сделать заключение об его исправности. Этот метод наиболее эффективен, так как позволяет хранить на компьютере большие базы данных с информацией об отслеживаемой динамике повреждений электродвигателя с последующим прогнозированием выхода его из строя.
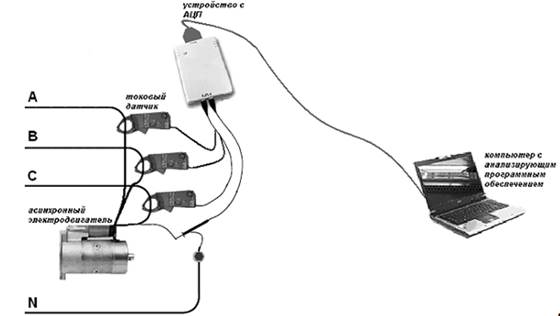
Рис. 1. Диагностический программно-аппаратный комплекс
Кроме этого, компьютер является более мощным средством обработки информации, чем микроконтроллер, что, в частности, позволяет использовать современные технологии, в том числе и технологии искусственного интеллекта, такие как использование искусственных нейронных сетей, нечеткой логики и экспертных систем.
Известно, что магнитное поле вращающегося ротора работающего асинхронного электродвигателя воздействует на магнитное поле его статорной обмотки, что приводит к периодическим колебаниям электрических величин электродвигателя, таких как потребляемый ток, мощность или напряжение обмотки статора. Период данных колебаний пропорционален, частоте вращения ротора. Таким образом, анализируя форму графика сигнала какой-либо из электрических величин на данном периоде можно обнаружить повреждение в электромеханической части электродвигателя и распознать его вид. Для решения данной проблемы можно использовать много различных подходов. Например, можно построить аппроксимационную функцию по нескольким исходным точкам сигнала, соответствующего конкретному виду повреждения, и в процессе диагностики сравнивать текущие измеряемые значения со значениями данной функции с определенной долей погрешности. Однако аппроксимация сложных нелинейных сигналов приводит к большим погрешностям, которые усугубляются дополнительными помехами электрической сети с подключенным электродвигателем. В настоящее время широкое распространение получило использование искусственных нейронных сетей для построения математических моделей сложных нелинейных процессов, распознавания образов и прогнозирования сигналов.
Нейронная сеть - это набор нейронов, каждый из которых представляет собой модель биологического нейрона, изображенного на рис. 2. Каждый нейрон имеет так называемые дендриты, синапсы и аксоны. Дендриты идут от тела нервной клетки к другим нейронам, где они принимают сигналы в точках соединения, называемых синапсами. Принятые синапсом входные сигналы подводятся к телу нейрона. Здесь они суммируются, причем одни входы стремятся возбудить нейрон, другие - воспрепятствовать его возбуждению. Когда суммарное возбуждение в теле нейрона превышает некоторый порог, нейрон возбуждается, посылая по аксону сигнал другим нейронам. У этой основной функциональной схемы много усложнений и исключений, тем не менее, большинство искусственных нейронных сетей моделируют лишь эти простые свойства .
Похожие статьи:
Расчет суточной производственной программы
Определение суточной программы по ТО и диагностированию автомобилей является критерием выбора метода организации ТО (на универсальных постах или поточных линиях) и служит исходным показателем для расчета числа постов и линий ТО. По видам ТО (ЕО, ТО-1, ТО-2) и диагностированию (Д-1, Д-2) суточная пр ...
Определение рабочего парка грузовых вагонов
Потребность рабочего парка вагонов определяется на основании затрат вагоно - часов по элементам перевозочного процесса по формуле: пр= пtn+ntгр.оп+ntтех 24 где
п
tn - затраты вагоно – часов в поездах: складывается из затрат вагоно – часов в движении и в простоях на ...
Расчет механизма передвижения
крана
Механизм передвижения выполняем с раздельным приводом от асинхронных двигателей с фазным ротором. Половина колес выполняются приводными. Ходовые колеса - двухребордные, смонтированные на подшипниках качения. Конструктивно механизм передвижения выполнен в виде скрепляемых с основанием стоек опор одн ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация