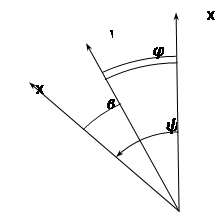
Выбор законов управления в канале руля направления
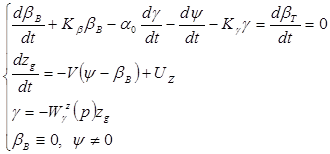
Управление центром масс самолета на заданной траектории в боковой плоскости, при построении системы по принципу управления рысканием.
 (1)
(1)
Запишем систему уравнений, считая ![]()
Разрешим данную систему уравнений относительно Zg; продифференцируем 2-ое уравнение: 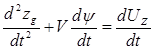 , подставим 1-е уравнение
, подставим 1-е уравнение 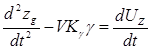 , подставим уравнение 3, получим:
, подставим уравнение 3, получим:  , где
, где ![]() – неизвестное управление. Для устойчивости систему необходимо и достаточно, чтобы
– неизвестное управление. Для устойчивости систему необходимо и достаточно, чтобы ![]() . Получим
. Получим  , выбирая
, выбирая ![]() и
и ![]() мы можем обеспечить любой желаемый вид переходного процесса.
мы можем обеспечить любой желаемый вид переходного процесса.
Точность выдерживания заданной траектории полета зависит от постоянной составляющей ветра. Если ![]() , то правая часть в среднем =0 отсюда видно, что по завершении переходного процесса, когда
, то правая часть в среднем =0 отсюда видно, что по завершении переходного процесса, когда ![]() ,
, ![]() то есть система управления центром масс в боковой плоскости, построенная по принципу управления рысканием не допускает появления статической ошибки при действии на самолет постоянного ветра. Посмотрим,, какими будут остальные параметры движения ЛА.
то есть система управления центром масс в боковой плоскости, построенная по принципу управления рысканием не допускает появления статической ошибки при действии на самолет постоянного ветра. Посмотрим,, какими будут остальные параметры движения ЛА. ![]() , тогда
, тогда  то есть
то есть ![]() , а из 2-го уравнения находим, что
, а из 2-го уравнения находим, что ![]() .
.
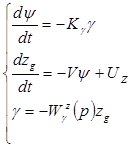
Какой должна быть система управления, реализующая такой полет? Запишем уравнение системы, построенной по принципу управления рысканием:

как только появилось скольжение, датчик скольжения выдаст сигнал.  – формирование заданного крена.
– формирование заданного крена.
Очень часто сигнал с датчика скольжения заменяется сигналом ![]() – сигнал боковой перегрузки.
– сигнал боковой перегрузки.
![]()
Вспомним уравнение сил в боковом движении, при ![]()
![]() , следовательно
, следовательно ![]() и
и ![]()
![]() , а
, а ![]() , тогда
, тогда ![]() ,
,  ,
,  , то есть сигнал скольжения может быть заменен сигналом боковой перегрузки. Часто, чтобы убрать скольжение законы управления пишут:
, то есть сигнал скольжения может быть заменен сигналом боковой перегрузки. Часто, чтобы убрать скольжение законы управления пишут: 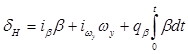 или
или 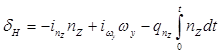 , когда
, когда ![]()
![]() ,
,  .
.
Наиболее распространенным законом управления в канале руля направления является закон вида:
![]() (1.1)
(1.1)
Где ![]() - статические передаточные числа.
- статические передаточные числа.
Причем, сигнал по β заменяется сигналом по боковой перегрузке nz.
Скольжение β связано с перегрузкой соотношением ![]() , тогда уравнение (1.1) примет вид:
, тогда уравнение (1.1) примет вид:
![]() (1.1.2)
(1.1.2)
Похожие статьи:
Динамический расчет КШМ двигателя
Расчет сил давления газов Сила давления газов, Н: (3.1) где – атмосферное давление, МПа; , – абсолютное и избыточное давление газов над поршнем в рассматриваемый момент времени, МПа; – площадь поршня, м2; (3.2) Величины снимаются с развернутой индикаторной диаграммы для требуемых φ и заносятся ...
Энергосберегающие технологии при выполнении ТО и ТР
Анализ режимов работ электроосвещения: -замена ламп накаливания на люминесцентные в 6 раз снижает электропотребление. -для систем освещения, устанавливаемых на высоту более 5 метров от уровня освещения поверхности, рекомендуется применение металлогалогенных ламп вместо люминесцентных. -рекомендуетс ...
Расчет производственной программы по ТО и ремонту
Расчет количества ТО и ремонтов. Определение периодичности ТО (1) где - нормативное значение периодичности ТО-1 и ТО-2 ([л.1], табл. Г1), К1– коэффициент корректирования нормативов в зависимости от условий эксплуатации ([л.1], табл. П2), К3 - коэффициент корректирования нормативов в зависимости от ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация