Расчёт тока электровоза, полного и удельного расхода энергии
Ток, потребляемый из контактной сети определён по мощности электровоза.
Электровоз преобразует электрическую мощность Рэл, потребляемую из контактной сети, в механическую мощность Рэ = W · v.
Электрическая мощность Рэл при постоянном токе равна произведению напряжения контактной сети Uc на ток электровоза Iэ:
Iэ = ![]() =
= ![]() . (6.1)
. (6.1)
где ŋэ – коэффициент полезного действия электровоза постоянного тока.
При движении с постоянной скоростью можно принять равным 0,9.
Uc – напряжение контактной сети В.
Iэ = ![]() =1553 (А)
=1553 (А)
Ток вычисляется для всех значений мощностей Рэ из таблицы 2 и по вычисленным значениям строятся два графика Iэ (v) для двух значений загрузки вагонов (рис. 3). Расчёты Iэ представляются в табл. 3.
Таблица 3. Расчет тока электровоза
|
Вычисляемые величины |
Значения величины при скоростях движения, км/ч | |||||
|
20 |
40 |
56 |
60 |
80 |
100 | |
|
Iэ, А |
496,3 |
1048 |
1553 |
1690 |
2453 |
3377 |
|
Iэ,м, А |
589,1 |
1226,1 |
1742 |
1966 |
2838 |
3854,3 |
Полный расход энергии электровозом рассчитан по формуле, Вт·с:
Wэ = ![]() (G + Q) (wo + iэ) S. (6.2)
(G + Q) (wo + iэ) S. (6.2)
где: wo – удельное основное сопротивление движению;
S – длина участка.
wo = Wо /(G + Q) = 72648,1 / (1824,6 + 34825,5) = 1,2 (Н/кН)
Wэ = ![]() (1824,6 + 34825,5) (1,2+3,9) 11000 = 1,28·36650,1·5,1·11000 =2,631 · 109 (Вт·с).
(1824,6 + 34825,5) (1,2+3,9) 11000 = 1,28·36650,1·5,1·11000 =2,631 · 109 (Вт·с).
Удельный расход электроэнергии определяется по формуле, Вт·с/ткм:
wэ = ![]() =
= ![]() . (6.3)
. (6.3)
wэ = ![]() = 64020 (Вт·с/ткм).
= 64020 (Вт·с/ткм).
Для перехода к Вт·ч/ткм выражение (6.4) следовало разделить на 3600
wэ = ![]() = 17,78 (Вт·ч/ткм).
= 17,78 (Вт·ч/ткм).
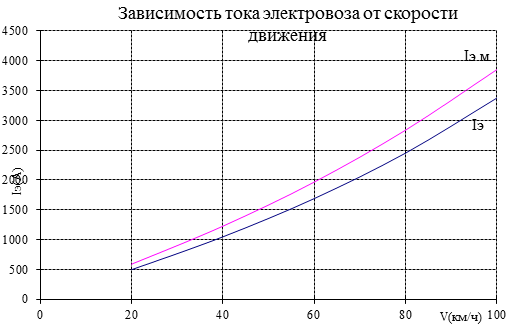
Рис. 3
Похожие статьи:
Штатное расписание работающих
Участок текущего отцепочного ремонта пассажирских вагонов Специальность Кол - во Разряд Мастер участка производства 1 Бригадир (освобождённый) 2 6 Слесарь по ремонту подвижного состава 7 5 Слесарь по ремонту подвижного состава 5 4 Электрогазосварщик 2 5 Токарь 1 5 Кладовщик 1 3 Слесарь инструментал ...
Расчет числа постов и поточных линий для то и тр подвижного состава
Для определения оптимального количества постов следует при назначении количества рабочих, одновременно работающих на постах, учитывать специфику работы поста и габариты автомобиля. Среднее число рабочих на одном посту зон обслуживания и ремонта принимаем по табл. 16 [1]. Принятое число рабочих на о ...
Расчёт технико-экономической эффективности
Технико-экономическая эффективность применения автоматической наплавки изношенных деталей определяется с учетом имеющихся рекомендаций. Снижение трудоемкости наплавки: (7.1) где Тб, Тс − штучное время наплавки по базовому (автоматическая под флюсом) и сопоставимому (автоматическая вибродугова ...
Навигация
- Главная
- Ходовая часть автомобиля
- Организация работы отделения дороги
- Развитие автодорог в России, Германии и США
- Ремонт электроподвижного состава
- Виды и устройство эскалаторов
- Двигатели внутреннего сгорания
- Информация